时间:2026-05-15 访问量:577
在机器人研发与原型验证阶段,如何快速、低成本地得到可以用于装配、测试甚至演示的零部件手板,一直是工程师和产品经理们关心的问题。作为一位在这个行业深耕多年的技术顾问,我见过太多因为选择不当的制作工艺而导致的延期与成本超支。今天,我就以3D打印机器人手板模型为核心,从优势、局限到决策流程,为你提供一次系统的专业拆解,希望能帮助你少走弯路。

1. 极高的设计自由度,突破传统工艺瓶颈
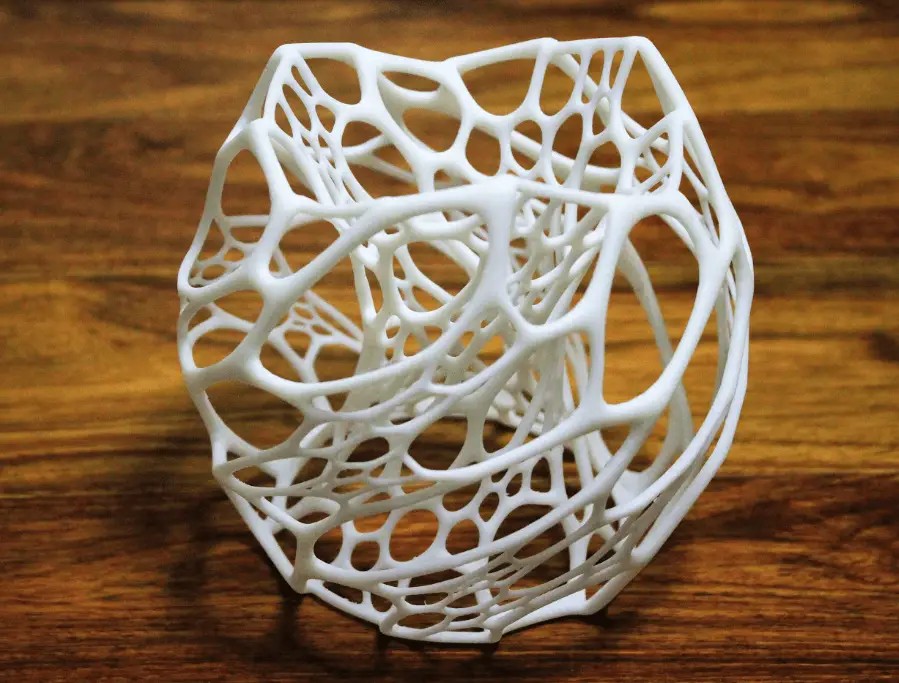
传统CNC加工或注塑工艺受限于刀具路径与模具脱模角,对于机器人身上常见的复杂拓扑结构、异形散热通道、仿生关节曲面或内部网格减重结构,往往难以直接制造或成本极高。3D打印(尤其是SLS、SLA、MJF等工艺)让设计师可以“为功能而设计”,而非“为制造而设计”。例如,在机器人关节处设计一体成型的柔性缓冲结构,或在手臂内部布置非直线的气管导管路径,在传统工艺中几乎无法实现,但3D打印可以一次性完成。
2. 极快的迭代速度,从数周缩短到数小时
手板模型的核心价值在于“快速验证”。在传统流程中,即使是一个相对简单的机器人手指组件,修改设计后重新开CNC编程、装夹、加工,通常需要3-5天。而3D打印只需导出修改后的3D文件,晚上提交打印任务,次日早上即可拿到实物。这种“当天设计,次日测试”的能力,对于需要快速响应竞品变化或进行多轮用户测试的机器人项目至关重要。
3. 小批量生产的成本优势
当机器人手板需求量仅为几件到几十件时,3D打印没有模具费用,也没有最低起订量要求。一个30件的机器人外壳试产批次,使用惠普Multi Jet Fusion(MJF)工艺的总成本,可能仅为传统注塑开模费的5-10%,且无需承担万一设计变更导致模具报废的风险。
4. 多材质、多性能的仿真度
现代3D打印材料已大幅进步,远非早期脆弱的树脂。你可以根据机器人手板的不同功能区域,选择不同的材料:
- 结构件:使用尼龙12(PA12)或碳纤维增强尼龙,强度与韧性接近ABS甚至PC(聚碳酸酯)。
- 柔性部件:使用热塑性聚氨酯(TPU)材料,模拟橡胶或硅胶的弹性,用于机器人足底、抓手软垫。
- 透明或高光件:使用透明树脂,用于传感器窗口或外观验证。
- 金属件:金属粉末烧结(SLM/DMLS)可直接打印铝合金、钛合金,用于高负载的关节或连接件。
5. 无工具约束的变体生产
机器人产品常分不同型号或配置(如标准版与重载版,舵机版本与空心杯版本)。使用3D打印,只需在CAD模型中调整参数,即可在同一台设备上同时输出多个变体版本,不需要更换任何刀具或模具。这对于验证不同电机抬升力的机器人手臂尤为高效。
1. 尺寸精度与表面粗糙度的妥协
虽然高精度3D打印(如SLA)可以达到±0.1mm的精度,但这通常低于精密CNC加工(±0.02mm)。在机器人关节轴承孔、精密导轨安装面上,直接用3D打印表面配合,可能出现晃动或卡死。多数情况下,你需要预留0.2-0.3mm的加工余量,后期再通过CNC或手工修整关键配合面。打印层纹是物理缺陷,要得到镜面级外观,需要大量的打磨、底漆和喷涂工序。
2. 各向异性强度与长期承载风险
这可能是最容易被忽视的问题。许多3D打印技术(尤其是FDM熔融沉积)的Z轴层间结合力仅达到XY方向的50-70%。如果你将机器人手板的长臂沿Z轴竖立打印,进行负载测试时,断裂会首先出现在层间缝隙处。即便使用SLS尼龙,虽然各向异性较小,但在持续动态应力下,其疲劳寿命仍落后于注塑件。强烈建议:对承重结构进行有限元分析时,将各向异性安全系数设置为1.5-2.0。
3. 材料选择与性能上限
3D打印树脂类材料普遍不耐紫外线(易黄变、变脆),且热变形温度较低(SLA树脂约60-80℃,尼龙PA12约180℃相比注塑级PA66的250℃仍有差距)。如果你的机器人手板需要在高温环境(如电机壳体散热区)或长期户外使用,3D打印只能作为原型验证,量产仍需转回注塑或压铸。
4. 后处理工时不可忽视
很多客户只计算了打印成本,忽略了后处理的时间与费用。去除支撑结构、打磨层纹、攻丝、嵌铜螺母、表面抛光、喷漆……这些步骤往往占总工时的50%以上。以机器人复杂内腔为例,清理内部支撑可能需要用小锉刀和吹气枪反复操作1-2小时。
5. 大型零件的尺寸与成本限制
商用3D打印设备的工作腔尺寸通常为500mmx500mmx500mm左右。超过此尺寸的机器人主体结构(如人形机器人躯干、工业机器人底座),必须拆分打印后粘接或组装。这不仅增加拼接缝隙的打磨工作量,还可能导致整体强度下降。同时,大尺寸零件的打印时间极长,成本随体积呈几何级数增长,有时不如传统减材制造经济。
第一步:明确阶段需求——试什么?
- 外观验证(Form):首选高精度SLA光固化树脂,表面光滑,细节表现力强,适合评审外观造型、按键布局、指示灯开口位置。
- 结构验证(Fit & Function):对于需要承受一定力矩的机器人关节臂、底盘骨架,选择SLS尼龙(PA12/PA12-GF)或选择性激光烧结尼龙。注意受力方向需与打印XY平面平行。
- 小批量试产(Pre-production):如果零件数量在50-200件,且对表面要求不高(亚光纹理),MJF是性价比之王。它平衡了强度、速度和成本。
- 极端环境测试:金属打印(SLM)适用于电机壳体、高强度连接件,但成本高,且热后处理复杂。
第二步:执行前必做的设计调整
如果你是产品设计者,那么请在设计阶段就为3D打印做优化:
- 避免悬垂与尖角:大于45°的悬垂结构必须设计支撑,且后期难去除。建议将倾斜角度控制在30°以内,或直接加入圆角。
- 壁厚均匀化:避免突然的厚薄切换,防止冷却时翘曲。最小壁厚通常建议为0.8mm(SLA)或1.0mm(尼龙)。
- 预留加工余量:在重要的孔、螺纹、安装面上,设计一个0.3-0.5mm的工艺台阶,后期用CNC或丝攻做精加工。
- 优化减重结构:利用3D打印可以将实体内部设为蜂窝网格或斜线填充,在不影响强度下减重40-60%。在CAD软件中提前生成内部晶格。
第三步:选择正确的后处理方案
- 无要求:打印拆支撑后直接使用,如非关键展示件。
- 基础外观:打磨-喷涂底漆(填充层纹)-面漆(哑光/亮光)。注意机器人关节活动处不要上厚漆,以免卡死。
- 高要求外观:打磨至1000目以上→喷涂高固底漆→手工打磨→三遍喷涂(色漆+清漆)。可达接近注塑光洁度。
- 功能后处理:蒸汽平滑处理(使用特制树脂或PA12的部件,可消除层纹并增强表面硬度);渗透染色(用于尼龙件,实现表面着色而不增加厚度);喷砂处理(获得均匀的亚光质感)。
第四步:流程总结与成本策略
- 步骤1:准备好完整的3D STL文件(单位mm,封闭三角网格,无自相交)。
- 步骤2:上传至你的3D打印服务商平台或内部打印机,检查悬垂情况,自动/手动生成支撑。
- 步骤3:打印周期(以10个包含50个零件的机器人头部组件为例,SLS尼龙约需12小时打印+3小时清粉+1天物流)。
- 步骤4:收到零件后,先进行尺寸检测(用游标卡尺测关键孔距),然后做简单装配验证。重点检查:轴孔配合公差是否在H7/g6或H8/f7范围内;螺丝柱子是否过紧或滑牙。
- 步骤5:根据验证结果,可能需进行1-3轮微调后再确认。这个迭代循环是3D打印手板最核心的价值。
总结来说,3D打印机器人手板并不是万能的,但它以极高的灵活性斩断了传统制造业反复开模的时间和金钱枷锁。当你处于概念验证、小批量调试、或需要快速获得功能样机的阶段时,选择某一种或多种3D打印工艺的组合,绝对是最聪明的策略。但请务必记住:不要在精密配合与长期耐久性上抱有侥幸,设计时考虑后加工,测试时考虑各向异性。当你严谨地遵循以上流程,你的机器人产品从图纸到实物的跃迁,将变得前所未有的顺畅。
上一篇:连云港cnc手板定制
下一篇:CNC手板编程学徒

中制人坚持“诚信、质优、高效”的企业信念,被众多知名厂商所认可,并得到他们的大力支持与好评,在广大客户的支持与鼓励下,我们将一如既往的为客户提供更加优质的服务。